
- Dspace and Mathworks are expanding their collaboration to strengthen the integration between their simulation tools dedicated to the development of autonomous driving systems.
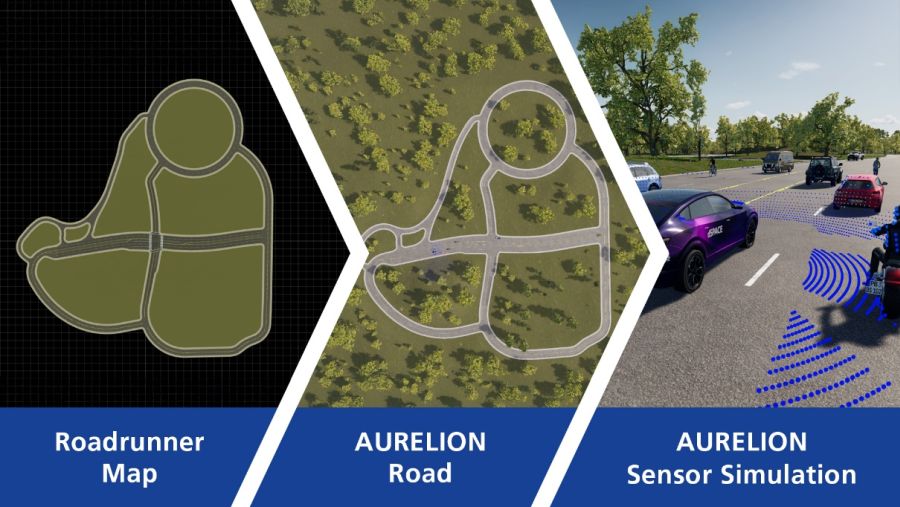
- This development now allows the direct use, within Dspace’s ASM OpenX, of road models created with RoadRunner, Mathworks’ road scenario and infrastructure editor.
ASM OpenX represents the next generation of traffic models developed by Dspace. It is natively based on the open standards OpenScenario XML and OpenDrive, used in simulation environments for autonomous vehicles. This approach aims to eliminate the intermediate steps of converting scenarios and road models, which are often a source of errors and manual rework, and to simplify integration into existing simulation toolchains.
RoadRunner is an interactive environment for creating detailed road networks, 3D scenes, and traffic scenarios. It supports the OpenDrive and OpenScenario standards and offers programmatic interfaces that facilitate the automation and customization of models. Its integration with ASM OpenX allows development teams to directly use OpenDrive-compatible road descriptions in Dspace traffic simulations.
According to the two partners, this interoperability, based on open standards, aims to improve the efficiency of the design and validation phases of automated driving functions. It enables work on a wide range of road configurations and scenarios, covering different Operational Design Domains (ODDs), while reducing simulation preparation time.
This partnership expansion is part of a broader industry trend toward promoting the adoption of open standards to facilitate data exchange between tools, improve simulation consistency, and support the development of autonomous driving technologies in increasingly complex virtual test environments.



