
- The Austrian company AVL has integrated a radar test solution from Rohde & Schwarz into its Drivingcube test platform. This makes it possible to test the radar functions operated by Advanced Driver Assistance Systems (ADAS) on a vehicle-in-the-loop test bed and to validate autonomous driving functions in a variety of reproducible driving scenarios.
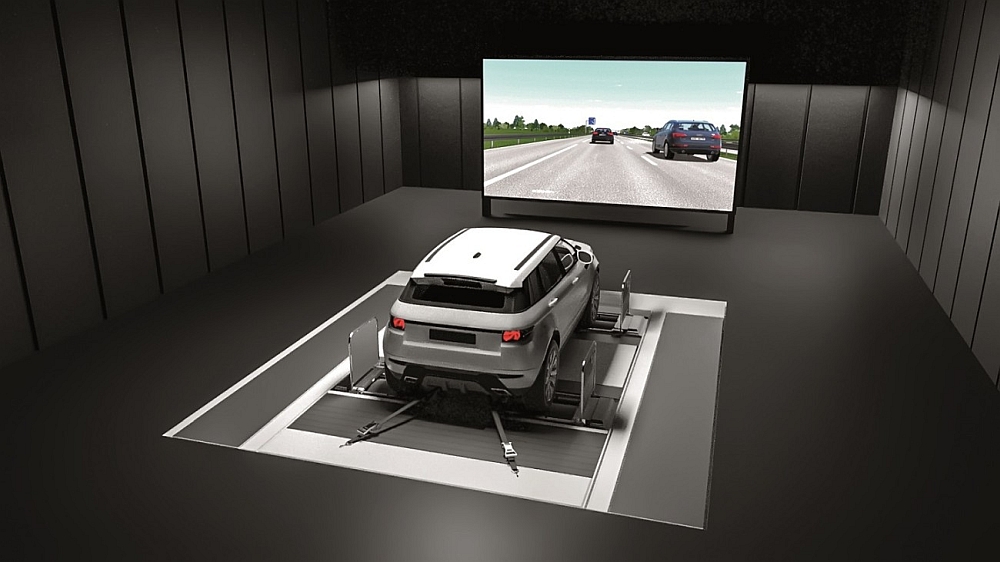
- AVL’s Drivingcube platform combines a digital simulation environment with a powertrain test chassis dynamometer on which the vehicle under test is mounted.
Advanced Driver Assistance Systems (ADAS) and Autonomous Driving (AD) functions such as emergency braking, adaptive cruise control and autonomous vehicle control on motorways are to be validated in all possible driving scenarios and environmental conditions. However, it is not possible to carry out all the road tests under real conditions. To overcome this problem, test methods can be virtualized by deploying an “X-in-the-loop” (XIL) approach.
To do this, AVL’s Drivingcube platform combines software simulation capabilities with tests carried out on a real vehicle installed on an instrumented motorised test bench. It is thus possible to operate the vehicle in a virtual environment while taking into account data from real sensors.
AVL and Rohde & Schwarz, who have already combined their solutions for the simulation of GNSS geolocation systems, have continued their collaboration in the field of radar target simulation. The German manufacturer’s radar test system was deployed on AVL’s vehicle-in-the-loop test bed to test the radar functions of advanced driver assistance systems (ADAS) and to ensure the safety of autonomous driving functions.
The antenna array is used to generate complex artificial objects for the radar sensors. Parameters such as distance and radial velocity, size and azimuth can be changed without physically moving the antennas or other elements. An adaptable real-time interface and seamless integration with AVL’s virtual test tool chain allow a variety of driving scenarios to be generated and tested. The scalable and modular system can be used on the same test bed to test all types of vehicles with different numbers and varieties of radar sensors. The solution is implemented for the validation of various functionalities: Adaptive Cruise Control (ACC), Lane Keeping Assist (LKA) and other functions of Advanced Driver Assistance Systems (ADAS) and Autonomous Driving (AD). Euro NCAP scenarios can also be validated.



