
- Anritsu has developed a test and simulation environment for Automated Valet Parking (AVP) systems in collaboration with Dspace and Apposite Technologies.
Customers of certain restaurants or shops can take advantage of a valet parking service. A professional parking attendant parks their vehicles in parking spaces. AVP (Automated Valet Parking) is a system that allows this parking to be done automatically, without a driver being in the vehicle. The AVP Technical Report Version 1.0 was released by the 5G Automotive Association in June 2022, and a wireless communication (Type 2) operation scheme related to the parking infrastructure and users’ smartphones was proposed.
AVP is developed as a use case for autonomous driving that could be deployed in the near term. For autonomous driving vehicles, the implementation of Type 1 AVP requires expensive facilities in terms of computation and sensing. This is not required, according to Anritsu, for Type 2 AVP for communicating cooperative vehicles. This reduces the cost of the vehicles and facilitates the implementation of AVP.
Type 2 AVP, however, requires highly reliable end-to-end communications. A test system must therefore evaluate QoS management and the effects of degradation in the IP layer. The wireless connectivity environment must also be evaluated. The test solution leverages a digital twin incorporating both virtual and real devices. This allows testing and certification of the AVP Type-2 system to be started before the real devices are available.
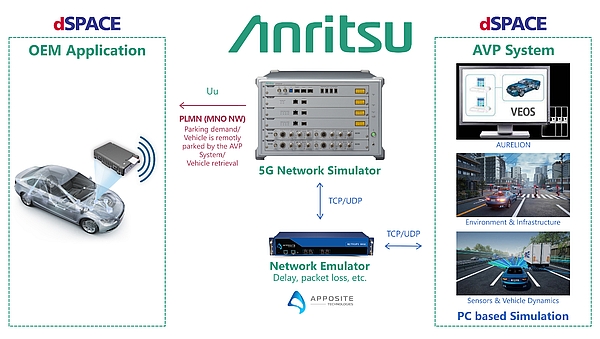
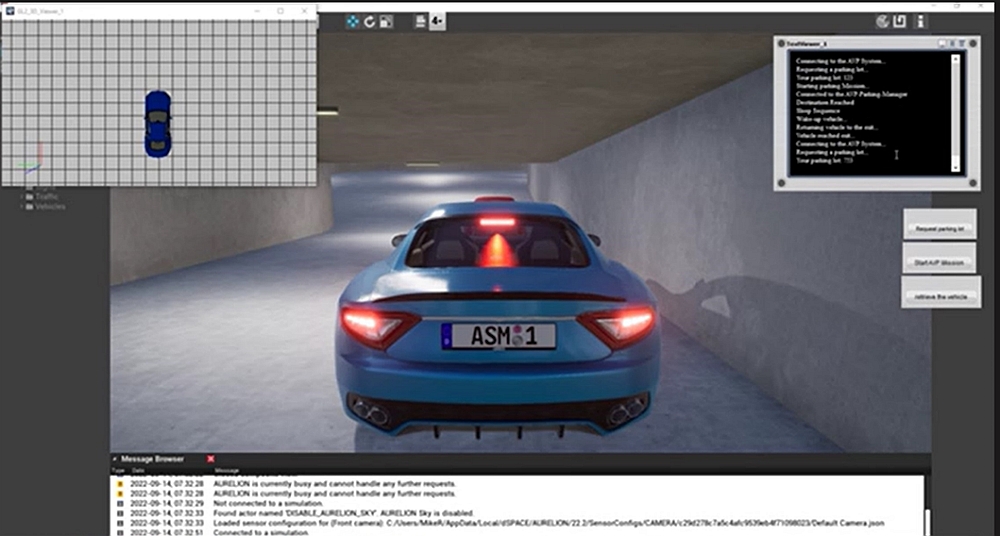
The Dspace software in which the AVP system is installed integrates and simulates all the information about the environment, infrastructure, sensors, and vehicle on the PC. The vehicle motion control (VMC) commands generated by the AVP system are transmitted to the in-vehicle application that drives the vehicle. The 5G communication between the vehicle and the AVP system is achieved through Anritsu’s 5G base station simulator. The VMC commands pass through the Apposite network emulator before being transmitted to the vehicle’s in-vehicle control application. IP data transmission delays and data packet losses are added by the emulator. This leads to instability of the vehicle control. Therefore, AVP developers need to design solutions to ensure the stability of the vehicle control.



