

- Increasingly, vehicles are using embedded applications to exchange data with Cloud platforms via a mobile radio network, sharing their position and obtaining useful information such as danger warnings, traffic information or available parking spaces. This creates new uses for the car, such as car-sharing or car-pooling.
- The validation of these applications is based on specific test procedures requiring the simulation of the real environment in which the vehicle will operate and the mobile communication network it will use to interact with its environment.
- This article explains how combining driving simulation tools with radio network emulation solutions can accelerate and simplify the testing procedures for Advanced Driver Assistance Systems (ADAS) by reducing the number of tests performed on the road.
François Ortolan – Anritsu EMEA Ltd
Let’s face it, modern cars have become smartphones on wheels. All the services provided by smartphones have been ported or tethered to the infotainments on board. In recent years, the industry moved beyond smartphones and started to build tailored applications and services directly for the automotive industry. This was usually referred to as ‘telematics services’.
The next generation of these applications will provide vehicles with the latest software updates and up-to-date and accurate HD map data for autonomous driving in real time. The applications are now integrated more closely with the vehicle and place high demands on data throughput, latency, and reliability of the mobile radio interface.
Telematics services assist the decision-making of the driver, or of algorithms driving the autonomous vehicle, such as ADAS systems. The Advanced driver-assistance systems (ADAS), rely on various sensors to make safety decisions. ADAS systems initially began by using sensors such as RADAR for distance and object sensing. To improve their representation of the world, ADAS started to fuse information coming from additional information such as Video and Lidar. This enables the build of a 3D model of the world surrounding the vehicle. However, one main limitation is its inability to see beyond the line of sight. This is where wireless networking can help as it communicates to the infrastructure or between cars. Car connectivity is now becoming an essential addition to safety and the user experience.
Road testing and Virtual testing
An approach for testing ADAS and Telematics services is to take it to the road. Road testing requires millions of miles to validate implementations, even though not every situation can be encountered. Reproducibility to test a given scenario is difficult and testing a given scenario for wireless communication in particular are challenging. The cellular network can fluctuate with the weather, user load, and the availability of the required network (LTE, 5G …).
Simulating the world in a lab is one solution to obtain reproducible results. It also cuts the cost and time required to validate releases before going to the road. Road testing is seen as essential, but is now considered the last step of testing.
Open loop vs Close loop
Traditionally, connected cars have been tested in labs the same way as a smartphone. Building on a suite of predefined test cases that can be played sequentially, providing a known input and ensuring that results fall within the expected range or follow an expected behaviour. This is referred to as open loop testing.
However, considering the life cycle and the exigence in term of reliability, security and longevity it has become apparent that this is not enough. A better representation of the real world is needed, moving away from predefined test cases and user scenarios.
This is why virtual driving is becoming an essential tool for pre-validation. In a virtual world scenario, there is a need to replicate the same initial conditions, but the decision made by the vehicle would impact the inputs in real time. This is referred to as closed loop testing.
Software in the Loop and Hardware in the loop
This methodology from the automotive world is named ‘Software in the Loop (SiL)’ or ‘Hardware in the Loop (HiL)’. In both cases, a 3D world is created and scenarios used.
Software in the Loop provides only a means to test the sensor fusion algorithm in a simulation.
Hardware in the Loop goes a step beyond the simulation by providing actual emulated stimulus to the sensors hardware platform running the algorithm.
Example of Virtual World used in SiL and HiL (dSPACE)
Currently, ‘Software in the Loop’ represent 95% of the virtual driving for autonomous cars. Only 5% is done with ‘Hardware in the Loop’. The trends in the testing industry indicates that more validation is needed when hardware is used.
Testing telematics connectivity to the cloud in HiL
The closed loop approach for telematics testing, proposed in this article is new to the industry. The approach is to equip a HiL with a mobile radio network emulator that provides a realistic test network, consisting of base stations (radio access network) and a mobile radio core network. The HIL simulation can be used to validate the entire chain of effects, from the application in the vehicle to the realistic communication to the cloud service. This article presents a use case from the collaboration between dSpace for the HiL system, and Anritsu for the simulator (2G/3G/LTE/5G).
The Anritsu emulator can be connected directly to the Internet or a back-end server and exchanges data between the cloud service and the tested application in the vehicle. Wires or antennas can connect the emulator to the communication unit. With antennas, the radio signals must be appropriately shielded.
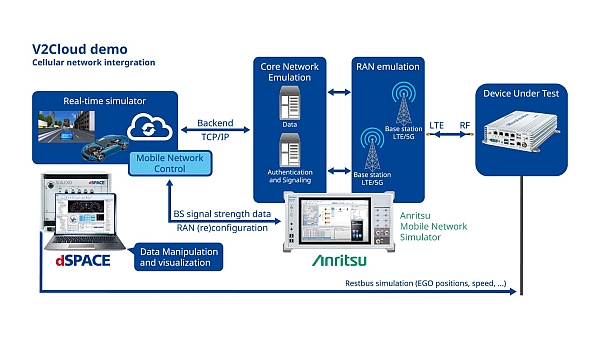
It is possible to control the mobile network emulator from the HIL simulator using a Simulink blockset. It allows reconfiguration of the mobile network to manipulate data throughput and latency, for example. It also supports mobility scenarios such as a handover (changing from one cell site to another). During a virtual test drive, the radio link is transferred from one base station to the next without losing the data link. Another frequent test case is path loss, where the radio signal becomes increasingly weaker, or even breaks off completely during a drive. The blockset supports the Anritsu MD8475B Signalling Tester (2G/3G/LTE) and is 5G ready for use in combination with the 5G communication tester (Anritsu MT8000).
Virtual Driving paving the way for type approval
The virtual driving community is actively defining the scenarios needed to validate autonomous cars. Reducing the infinite situations encountered on the road to a subset of essential scenarios is a crucial job. This subset will pave the way for legislators to build a framework to validate the safety of ADAS systems and autonomous vehicles. For now, scenarios focus on environmental conditions that would impact the current sensor inputs such as Radar/video/ Lidar.
However, it is expected telecommunications will play an increasing role in the sensor fusion decision-making of autonomous cars in the future. With the evolution of wireless communication in 5G tailored to the automotive needs, more and more features such as Vehicle-to-Everything (C-V2X) will become safety critical. Environmental conditions such as radio coverage will play a key role in defining the scenarios.
One of the most exciting use cases for 5G is sensor sharing and remote driving. A ‘Hardware in Loop’ system with cellular connectivity is the perfect test bed for research, prototyping and validating 5G features.




